
N-R-P Ultron Zr Build #3 (Engine mount, servos and radio tray)
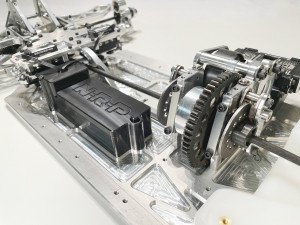
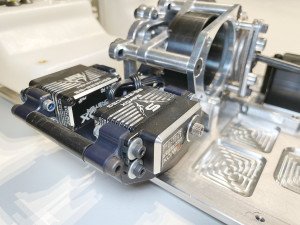
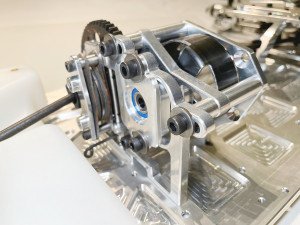
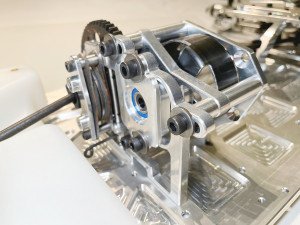
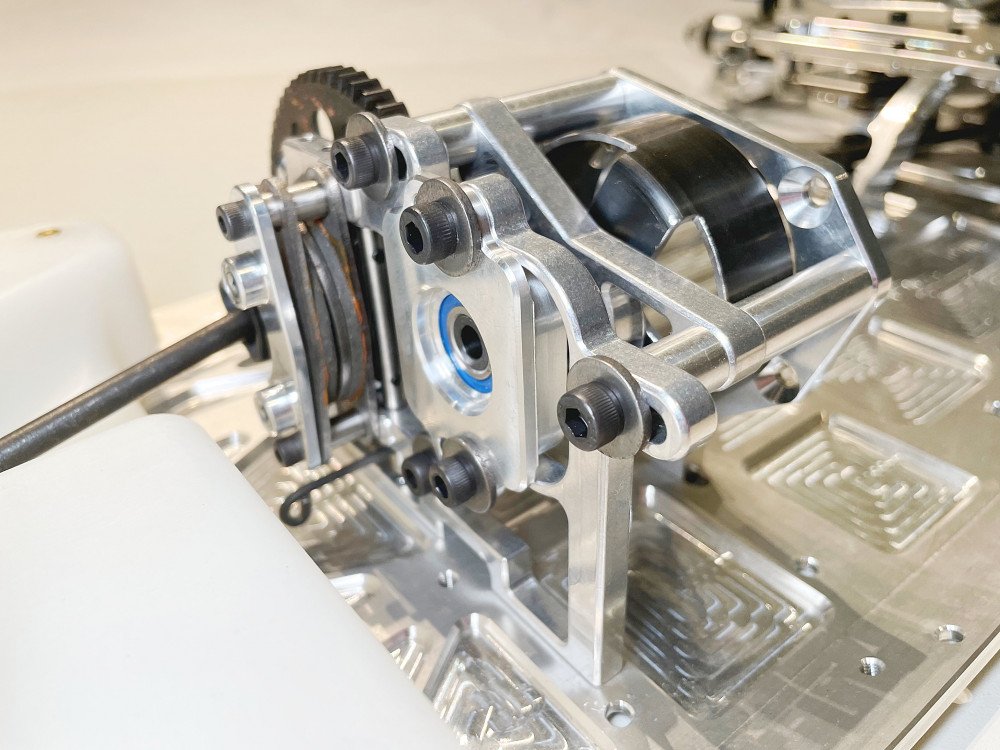
The engine mount and the clutch carrier is completely open to allow for good cooling. Instead of using a system of different spacers for different pinion gears as the Losi have it the Ultron uses long holes for complete control. I also like how the bearings reside on each side of the bearing for really good support and no angular forces, nice touch!
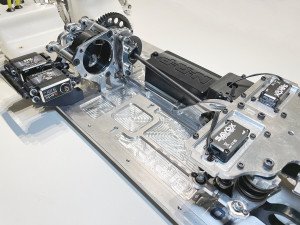
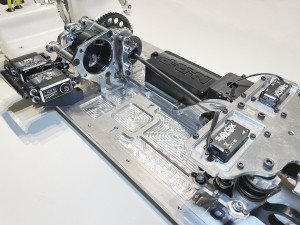
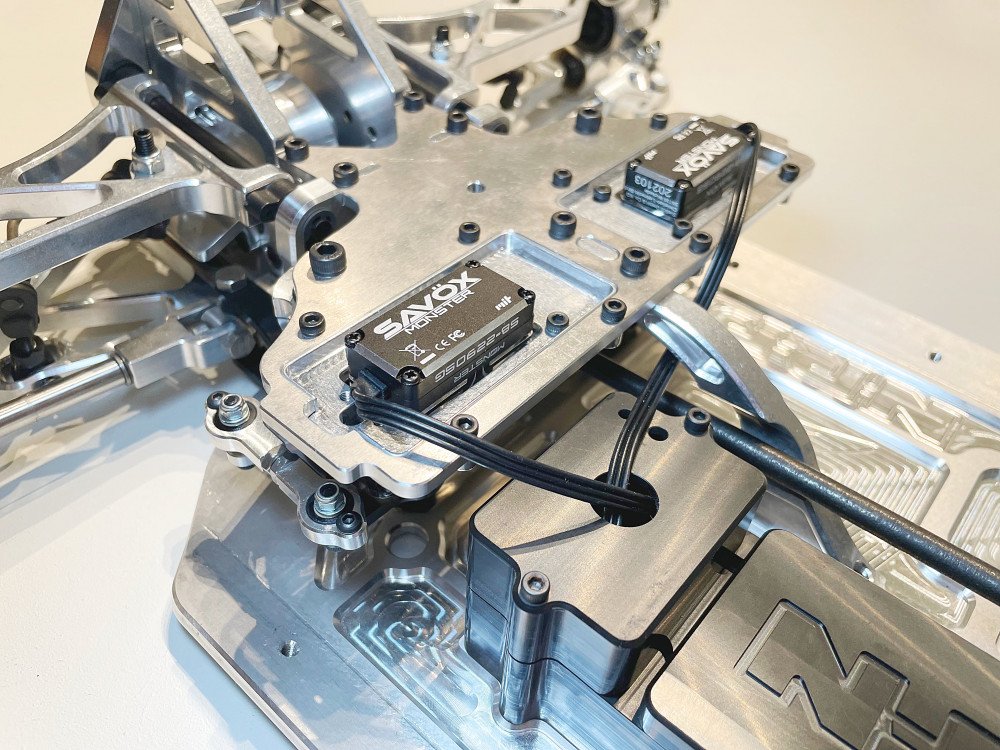
The breaking and throttle servos are mounted on a plastic holder consisting for two braces and connecting pieces with rubber mountings to to have a good and secure fit to the chassis.
We're using 4 identical Savöx SB-2290SG servos in the car so it's easy to replace and switch them around if needed.

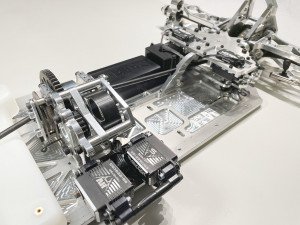
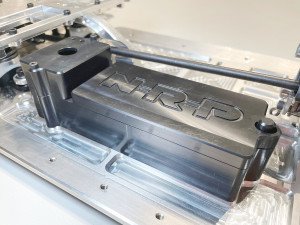
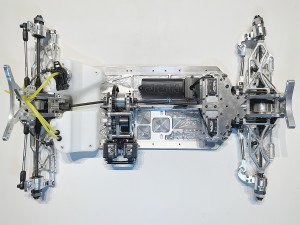
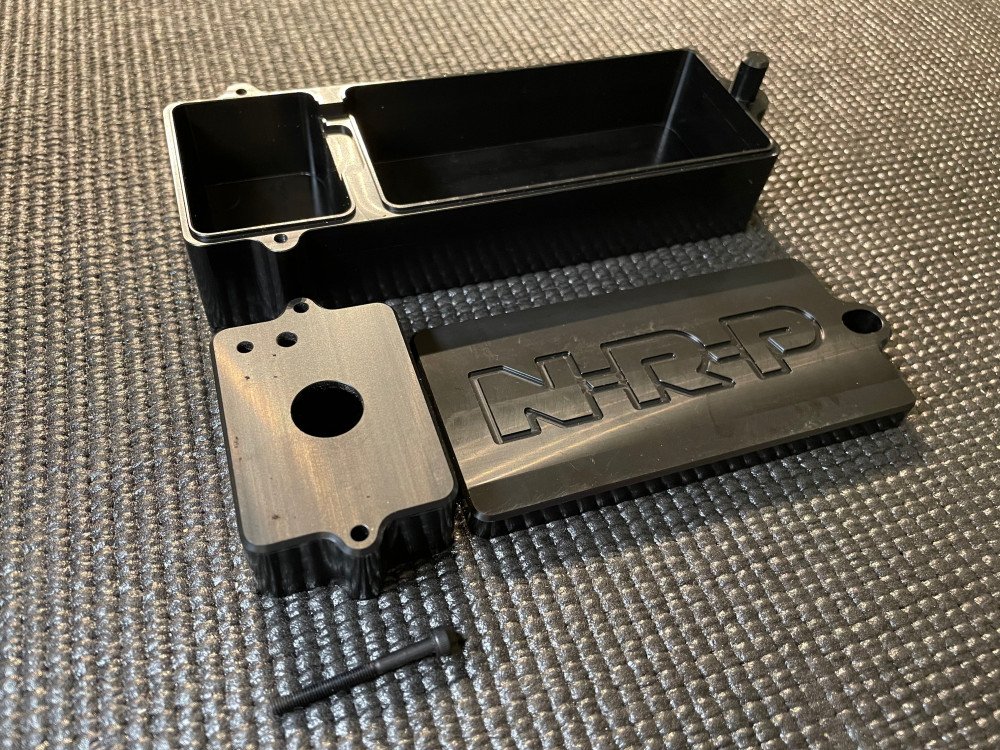
The electronics box is roomy and have separate compartments for the receiver (killswitch and transponder) and the battery. The battery box fits a shorty battery pack. We have used an even smaller battery before but might upgrade to have enough battery to last a whole day.
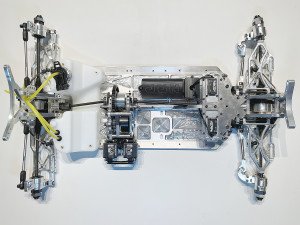
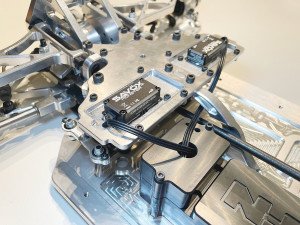
The steering servos are mounted upside down. We're not a big fan of this as it's harder to work on and you can see if a screw to a servo arm is loose. The servo mountain plate has different insert depending on what type of servos you want to use, it support the traditional large scale servos, as well as the little smaller Rhino size servos and the smallest 1/8 scale servos. We're using the smaller 1/8 servos as the torque is enough and the two smooth servo savers will save the servos from any sudden impacts.
The build is now really starting to look like a complete car. Next we will add the shocks.